




Item 1 of 1
行业侵权预警!这款利用螺旋桨实现横向移动的#泳池清洁机器人,已获发明专利

 1726
17262026-01-27 07:40
2026-01-27 07:40
1726

一键完成百千笔付款,超低费率+极速到账,一年轻松帮你省下数十万。
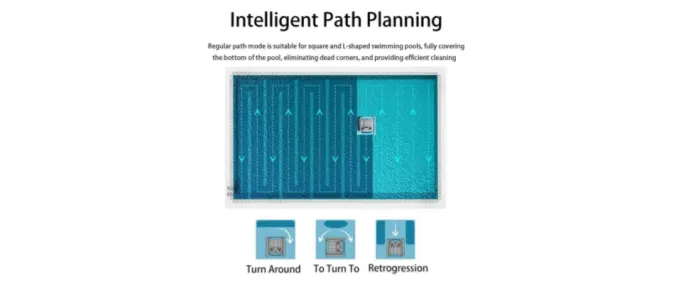
传统泳池清洁机器人有个共同的烦恼:很难横向移动,尤其清洁池壁水线时总“够不着”,导致清洁不彻底,还费水费电。
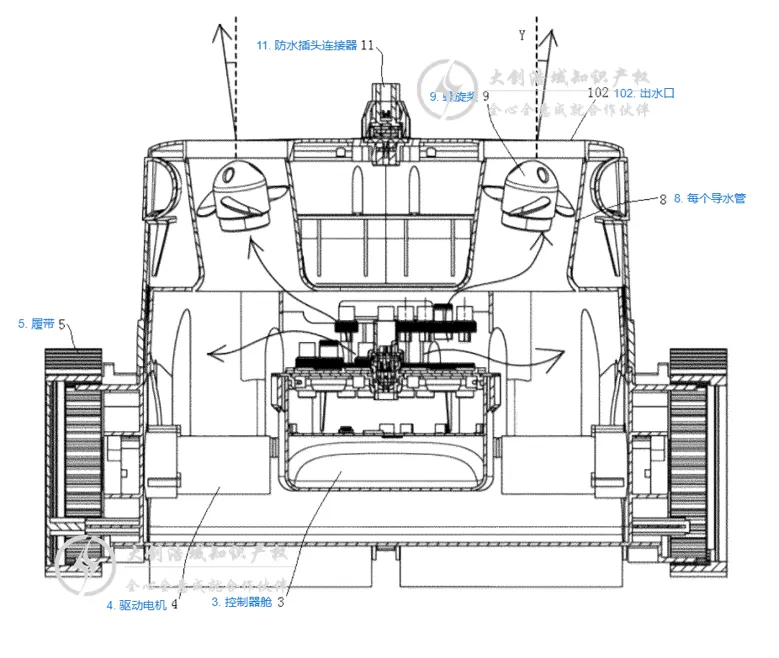
为此,新一代机器人做了关键升级——它通过反向双螺旋桨与智能水流控制,实现了稳定的横向移动,再配合履带与清洁刷,能贴边沿壁高效工作。现在,无论是池底还是水线,都能被轻松清理干净,不仅洗得更彻底,也更省水电,让日常维护省心又省钱。

包含机身与机盖。 机身内设有密封式控制器舱室,内置控制电路,用于协调机器人各项功能。
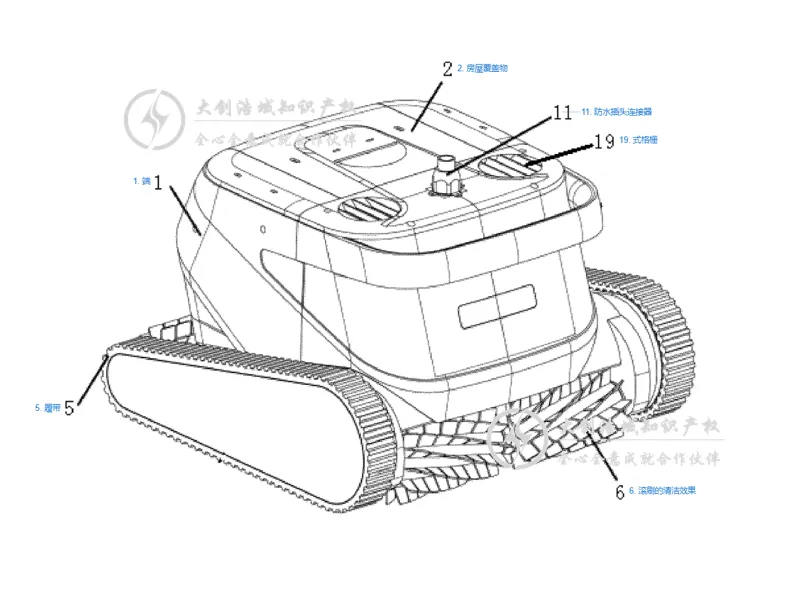
机身内部装有驱动电机,通过传动机构同时驱动位于机身底部的清洁滚刷以及机身两侧的履带,实现在池底与池壁的移动与刷洗。
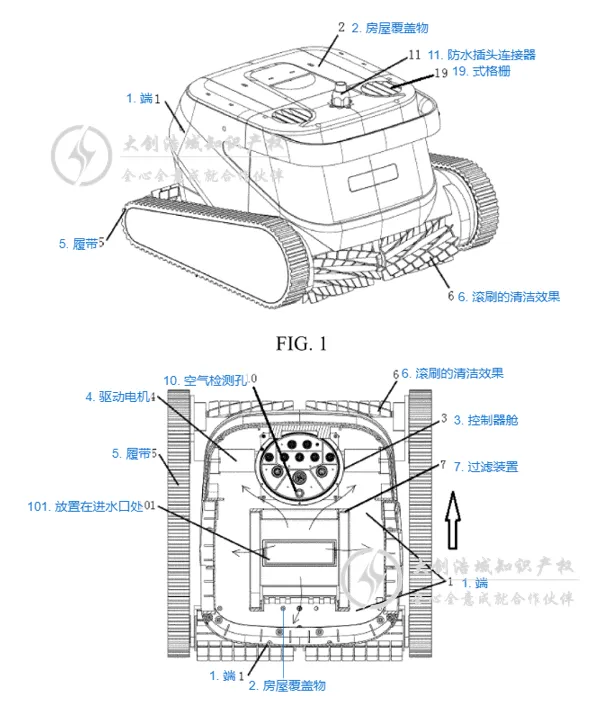
机身底部设有进水口,配有过滤装置,机盖覆盖其上,用于吸入并初步过滤池水。
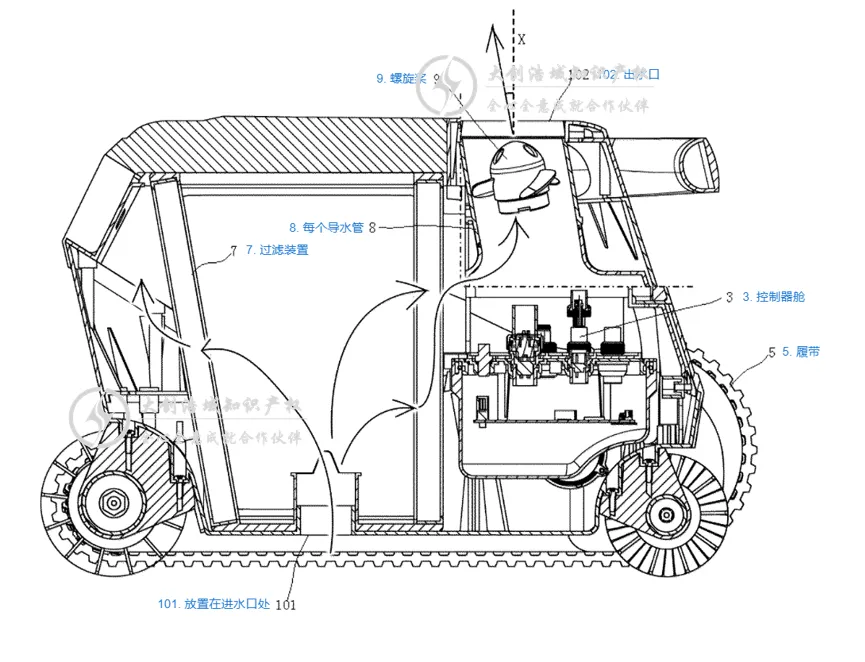
机身顶部设有两个出水口,每个出水口下方连接有水流导管,导管内装有螺旋桨(含电机与桨叶)。 两根水流导管呈对向布置,其螺旋桨电机与驱动电机均接入控制电路。 机器人通过控制两个出水口喷出水流的反冲力实现横向平移,具体可通过以下任一方式实现: 1. 将螺旋桨轴线与导管轴线对齐,并使轴线与水平面(X平面)及纵向面(Y平面)均呈 20°–45° 夹角。
2. 在出水口安装百叶窗式格栅,使其与X、Y平面夹角均为 25°–55°。
3. 将水流导管内置于机身或延伸至机身外部,使导管末端轴线与X、Y平面夹角分别为 20°–45°。
4.通过软管将各导管连接至伺服装置,并使伺服装置轴线与X平面夹角 20°–45°、与Y平面夹角 25°–55°。
1. 基本结构要有这些:
必须要有完整的外壳(机身)和盖子(机盖)。
里面得有个密封防水的控制盒,所有电路都放在里面。
2. 移动和打扫的方式是固定的:
只用一个主电机来提供动力。
主电机通过一套齿轮或皮带必须同时带动底下的圆筒刷子(清洁滚刷)以及两边的坦克履带。
3. 吸水过滤部分有特定设计:
机器底部有吸水口。
吸水口装有过滤网/篮。
上面的盖子必须盖住这个过滤网(特定的覆盖关系)。
机器顶部有两个喷水口。 每个喷水口后面都连着一根喷水管,管子里装有带独立电机的小螺旋桨。 两根喷水管必须是一左一右、朝相反方向的。 所有这些螺旋桨的电机和主电机,都由那个密封控制盒统一控制。 机器是靠两个喷水口向后喷水的反作用力来实现横向移动的。
请注意,侵权风险不仅限于整体结构,更在于具体的实现方式。 在评估产品时,还需要规避以下四种喷水方向的具体实现方式:
方式一(固定角度):让螺旋桨和喷水管的轴线倾斜安装,其前后和左右的倾斜角都在 20到45度 之间。 方式二(装栅栏):在两个喷水口装上可调角度的百叶窗式栅栏,栅栏片的倾斜角(前后和左右)都在 25到55度 之间。 方式三(弯管口):喷水管本身做成弯的(或在管口加弯头),让管口的朝向倾斜,其前后和左右的倾斜角都在 20到45度 之间。 方式四(软管转向):用软管连接喷水管,软管另一端连着一个可转动的舵机,通过控制舵机角度来调节方向,其前后倾斜角在20-45度,左右倾斜角在25-55度之间

TikTok、Facebook、谷歌、Twitter广告服务,0门槛抢占全球流量!
极速开户+优化投流+风险保障+效果跟踪,仅需4步,轻松撬动亿万海外流量,让品牌销量翻倍增长!
已成功开通5000+账户
最新热门报告作者标签

美客多将在墨西哥新建配送中心,预计新增超2000个岗位美客多将在墨西哥新莱昂州(Nuevo León)Escobedo市建设新的配送中心,进一步扩大其在墨西哥北部的物流网络。
一款mini充气泵遭美国人疯抢,在TikTok已经卖出近千万GMV用巴掌大卖点锁定女性用户,TikTok一款mini充气泵人气爆发!
TikTok Shop美国站新规汇总,卖家迎来更严格合规要求TikTok Shop发布了2026年6月月度政策汇总,对美国站卖家实施的15项政策更新进行了集中说明。其中,最大的变化是将美国消费者产品安全委员会(CPSC)的最新进口规定纳入平台卖家合规体系。
Lazada联手Gmarket带动韩货热销,新加坡成消费领先市场根据Lazada公布的数据,自2025年9月与韩国电商平台Gmarket合作以来,新加坡已成为东南亚韩国商品消费金额最高的市场之一,在客单价和高价值商品消费方面表现突出。
泰国短剧收入东南亚第一,TikTok计划推出付费模式移动短剧正在成为全球增长最快的移动娱乐内容之一。2026年第一季度,东南亚已贡献全球超过一半的短剧观看时长,其中泰国在应用内购买(IAP)收入方面位居东南亚第一。
年入近7亿,跨境服务商即将上市号称跨境电商“基础设施”的服务商赛道,即将迎来资本化里程碑。据港交所披露,6月24日,紫讯技术已正式向港交所主板递交招股书,迈出了冲刺资本市场的关键一步。招股书显示,紫讯技术成立于2015年,是一家提供电商软件服务的电商科技企业,旗下核心产品包括紫鸟浏览器、站斧浏览器以及LinkFox AI。作为跨境电商服务商赛道的老牌玩家,支撑其冲刺港股IPO的底气是什么?背后的故事,远不止“一家做浏览器的公司要上市了”这么简单。从业绩表现来看,紫讯技术的赚钱能力已高出同行一截。
倒计时!亚马逊FBA新品计划7月30日开抢,免仓租+返佣金年度最大力度新品扶持来了,免月度仓储费、返点奖励,7月30日准时开闸,卖家速做准备。
开始了,美国海关连砍三刀!很多人觉得,美国海关最近是不是缺钱了?不是。真正的变化不是罚得更狠,而是查得更准。近期,美国海关(CBP)连续公布三起典型案件:一柜来自中国的木制橱柜,因为申报价值500美元,实际货值却超过12万美元,被直接扣押;一批折叠椅因为不符合美国消费品安全标准,被拒绝入境;另外还有价值超过5400万美元的假冒奢侈手表,以及一批使用伪造报关资料进口的汽车零部件,同样全部落网。如果把这几件事放在一起看,你会发现,美国查的已经不是某一种商品,而是整个跨境贸易最赚钱、也最危险的那条灰色产业链。很多人一直以为,跨境行业最大的竞争力,是供应链,是产品,是运营。其实过去十几年,不少人的真正竞争力,是”敢不敢低报”。先说那个橱柜。
28天卖2.11万单,又一国产“搓澡神器”在TikTok卖断货7天登上TikTok榜一,河北搓澡皮子在海外“一战封神”
亚马逊累计裁员超5.7万人,AI浪潮冲击科技行业亚马逊自2026年初启动公司历史上规模最大的裁员以来,大批离职员工正面临竞争愈发激烈的科技就业市场。随着人工智能(AI)快速发展,越来越多科技企业持续调整组织架构,加大AI投入,也使科技行业就业环境发生明显变化。
26年亚马逊印度会员日刷新多项纪录,高端商品销量大涨亚马逊公布了2026年印度Prime Day大促活动的成绩单。作为进入印度市场后的第10届Prime Day,本届活动成为亚马逊印度历史上配送速度最快的一届。即时配送、消费升级、二三线城市消费增长以及中小卖家销售创新高,成为本届活动的主要亮点。
一天一家跨境电商公司:小品类黑马Epomaker机械键盘被视作小众品类,Epomaker用性价比加个性化定制做到3.5亿营收,挤进亚马逊前三。
突发!一集装箱船在霍尔木兹海峡附近遇袭失火中东局势再度升级,全球航运安全风险持续升温。当地时间7月12日,英国海上贸易行动办公室(UKMTO)发布安全通报称,一艘集装箱船在阿曼附近海域遭遇袭击,船尾受损并引发船上火灾,事件原因仍在调查中。与此同时,美伊双方相继发布声明,围绕霍尔木兹海峡的军事行动和航运安全局势进一步升级,再次引发国际航运业高度关注。UKMTO:集装箱船遇袭起火,事件仍在调查根据UKMTO发布的最新航行警报,北京时间7月12日6时40分左右,其接到一起海上安全事件报告。通报显示,事发地点位于阿曼以东约9海里海域。一艘集装箱船尾部遭受损坏,随后船上发生火灾。英国海上贸易行动办公室表示,目前有关部门正在对事件展开调查,以确认事故原因及具体情况。
突发!伊朗宣布无限期封锁霍尔木兹海峡封锁直至另行通知。
最高翻13倍!亚马逊FBA又开始涨费了就在Prime Day结束后没几天,7月8日,新一轮FBA收费标准正式生效。— 1 —亚马逊FBA又开始涨费了近日,多项费用同步上调,库存管理红线收紧,大件商品包装要求更严。这次新政里,对卖家冲击最直接的一条:超龄库存附加费大幅上涨。旧规则下,滞销库存的附加费压力还相对可控;新规则下,库龄一旦达到181天,附加费就开始上涨,而当库存存放超过365天时,附加费最高可达月仓储费的13倍。换句话说,那些积压超过一年的滞销库存,每个月都在亏钱,而且亏得越来越多。一批没有动销的库存,不只是"占着仓位"的问题,而是正在以月度仓储费13倍的速度吞噬利润。旺季前如果不清理干净,等到年底可能清出来的钱还不够付仓储费。
年入近7亿,跨境服务商即将上市号称跨境电商“基础设施”的服务商赛道,即将迎来资本化里程碑。据港交所披露,6月24日,紫讯技术已正式向港交所主板递交招股书,迈出了冲刺资本市场的关键一步。招股书显示,紫讯技术成立于2015年,是一家提供电商软件服务的电商科技企业,旗下核心产品包括紫鸟浏览器、站斧浏览器以及LinkFox AI。作为跨境电商服务商赛道的老牌玩家,支撑其冲刺港股IPO的底气是什么?背后的故事,远不止“一家做浏览器的公司要上市了”这么简单。从业绩表现来看,紫讯技术的赚钱能力已高出同行一截。
《全球宠物行业趋势与中国增长机遇报告》PDF下载宠物行业全年的销售额为660亿美元与去年同期相比增长了2.1%。
《TikTok Shop 2024-2025 西班牙站点报告》PDF下载在全球社交电商高速发展的时代浪潮中,TikTok已然崛起为品牌与消费者深度互动的重要阵地。TikTok不仅重塑了用户的消费习惯,更开创了"发现式购物"的新模式,为品牌营销带来了前所未有的机遇与挑战。
《2026年全球电商行业趋势洞察报告》PDF下载报告深度解读 2026 年全球电商行业发展趋势,全面剖析移动端与网页端市场格局、各区域网站流量增长动态,以及综合电商、服饰电商、美妆电商等核心赛道的细分趋势与头部玩家表现。报告同步收录标杆案例,拆解Nykaa、0live Young、UNIQLO 等区域头部电商的业务亮点、广告策略与用户画像,为品牌制定精准市场策略提供决策参考。
《2026年电子元器件行业趋势与策略解读》PDF下载据世界半导体贸易统计组织(WSTS)预测报告显示,2025年全球半导体营收将同比增长22.5%至7720亿美元,2026年将再度增长26.3%至9750亿美元,逼近1万亿美元大关;
《2025-Q1亚马逊沃尔玛全球电商CPC数据报告》PDF下载我们整合了Pacvue和Helium 10的专有数据库,全方位展示行业内范围最广的电商数据。这份报告包括数万家大中小型规模,不同品类广告主的数据,以及几个主要品类的详细分析。
《男装休闲服装品类2026秋冬趋势报告》PDF现在服装买家高度关注市场趋势,具有高频复购的特点,对趋势品的诉求相对更高,对于新品至少提前2-3个月进行采购且主要通过社媒获取服装趋势;
《美客多趋势报告-智利站》PDF下载在当今的消费环境中,每一次购物都成为消费者身份的体现,反映出消费者的兴趣、欲望和价值观。这些选择受到时代和文化的影响,不仅展现了消费者的偏好,也塑造了消费者与市场的关系。
《拉美八国经贸与投资概览》PDF下载中国与古巴1960年建立外交关系,正式开启了中国与拉美地区合作的新纪元。截至目前,中国已与26个拉美和加勒比国家建立外交关系,并同其中22个国家签署了共建“一带一路”合作文件,关系不断深化。









